Introduction
On April 19, 2025, China hosted the world’s first humanoid robot half-marathon, a remarkable event that stretched over 21 kilometers. This race was a true test of robotic endurance and adaptability, challenging the robots to navigate through a variety of terrains, including flat asphalt roads, cracked paths, gentle slopes, steep inclines, cobblestone paths, grassy fields, and gravel zones. While only 6 out of 20 robots managed to complete the race, the event marked a significant leap forward in robotics, showcasing both the progress made and the challenges that remain in bipedal locomotion.
Critics initially dismissed the competition as a mere publicity stunt. However, a closer examination reveals its historical significance, drawing parallels to the early struggles in automotive, aviation, and railway history.

1. Race Overview: Challenges and Outcomes
The competition underscored the immense difficulty of achieving stable bipedal robot mobility. Here are some key observations:
- Low Completion Rate: Only 6 robots successfully finished the race. The majority failed due to falls, mechanical failures, or instability issues.
- Comical Entries: Some robots, like a windmill-themed machine, provided comic relief but also highlighted the event’s inclusive participation criteria.
- Technical Breakdowns: One robot lost its “head” mid-race but continued to run, while others struggled to walk without frequent falls.
- Height Limitations: Most robots were shorter than average humans to lower their center of gravity and improve stability. The winning robot, Tiangong Ultra, stood out by combining near-human height with running capability.
These results sparked debates about the event’s legitimacy. However, historical parallels suggest that such “imperfections” are common in early-stage technological competitions.

2. Why Bipedal Robots Are Exceptionally Challenging
Bipedal locomotion is far more complex than quadrupedal movement due to inherent instability. Here are some key technical hurdles:
- Balance Control: Robots must continuously predict their Center of Mass (CoM) trajectory and adjust their Zero-Moment Point (ZMP) to avoid falls.
- Real-Time Adjustments: On uneven terrain, robots must process external disturbances (e.g., friction changes, obstacles) and recalculate joint parameters (position, speed, acceleration) within milliseconds.
- Energy Efficiency: Mimicking human muscle coordination requires precise actuator control, which remains a major engineering challenge.
Failure in any step, even a minor computational delay, results in immediate collapse. Currently, few companies worldwide can achieve stable bipedal running, with Chinese firms leading the field.

3. Historical Parallels: Early Days of Cars, Planes, and Trains
The robot marathon’s “underwhelming” performance mirrors humanity’s first attempts at mechanized transport:
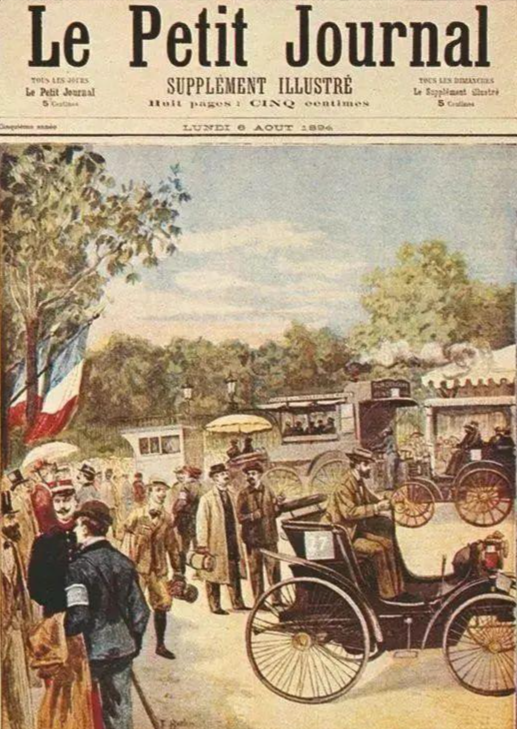
A. The 1894 Paris-Rouen Car Race
- Participants: 102 vehicles (gasoline, steam, electric).
- Outcomes: Only 9 finished; the winner, a steam car, averaged 20 km/h—slower than horse-drawn carriages.
- Public Reaction: Cars were mocked as “unreliable monsters,” yet they eventually replaced horses.
B. The 1909 Bennett Cup Air Race
- Participants: 38 planes; only 23 took off, and 9 completed the 100-km course.
- Achievements: Top speed: 75.6 km/h; max altitude: 155 meters. Despite rudimentary technology, aviation revolutionized transportation within decades.
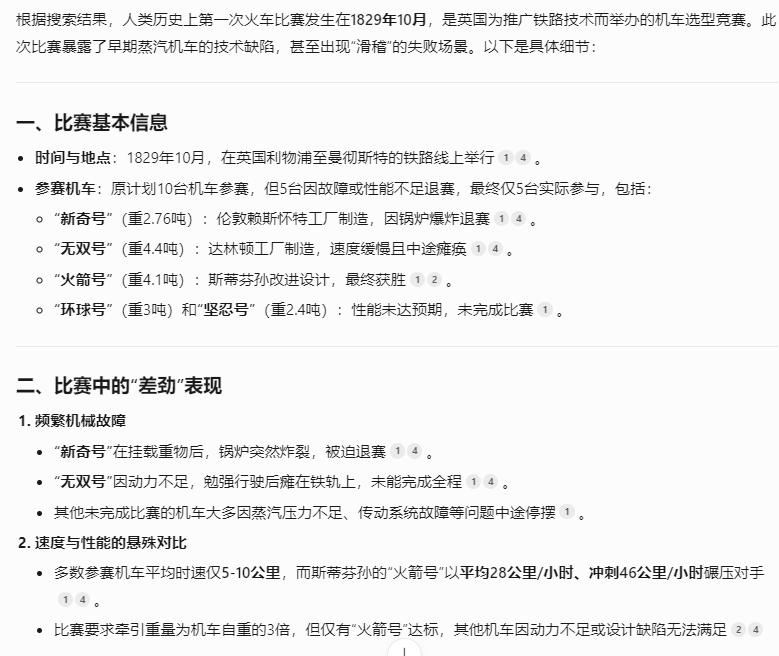
C. The 1829 Rainhill Trials (First Train Race)
- Participants: 10 trains; only 1, Stephenson’s Rocket, met requirements.
- Performance: The Rocket averaged 28 km/h, barely outpacing horses. Yet railways soon dominated land transport.
These examples prove that early technological competitions, while messy, often foreshadow transformative advancements.
4. Why This Robot Marathon Matters
Despite its flaws, the event holds profound significance:
- Technical Benchmarking: It pushed boundaries in real-world bipedal locomotion, a field dominated by Chinese innovators.
- Global Leadership: China’s role as host mirrors 19th-century France and Britain, which spearheaded early automotive and aviation races.
- Future Potential: Just as cars, planes, and trains evolved from clunky prototypes, bipedal robots could revolutionize industries like logistics, healthcare, and disaster response.

5. The Road Ahead for Bipedal Robotics
To achieve human-like agility, engineers must overcome several challenges:
- Dynamic Stability: Enhancing real-time balance algorithms for varied terrains.
- Energy Systems: Developing lightweight, high-efficiency power sources.
- Material Science: Creating durable yet flexible joints and actuators.
While current robots lag behind humans in speed and reliability, the marathon demonstrated that bipedal running is no longer science fiction—it’s a solvable engineering challenge.
Conclusion
The 2025 humanoid robot marathon, though riddled with hiccups, represents a pivotal moment in robotics. Much like the first car and plane races, it highlights the gritty early stages of a technology poised to reshape society. As China emerges as a leader in this field, the event signals a future where robots could walk—and run—alongside humans in everyday life.
With continued innovation and perseverance, the day when bipedal robots are as commonplace as cars and smartphones may not be far off.

Additional Images from the Event